Zhejiang Saiya Intelligent Manufacturing Co., Ltd.
Zhejiang Saiya Intelligent Manufacturing Co., Ltd. Fundada em 2009, com 15 anos de experiência no setor, é uma empresa de alta tecnologia especializada na produção e venda de micromotores CA, pequenos motores CA, motores CC com escovas, motores CC sem escovas BLDC, caixas de engrenagens planetárias de precisão, rolos de motor, etc.
Atacado da China Série FL 60 90 115 142 180 220 Caixa de engrenagem planetária helicoidal Fornecedores e
OEM/ODM Série FL 60 90 115 142 180 220 Caixa de engrenagem planetária helicoidal Fabricantes,
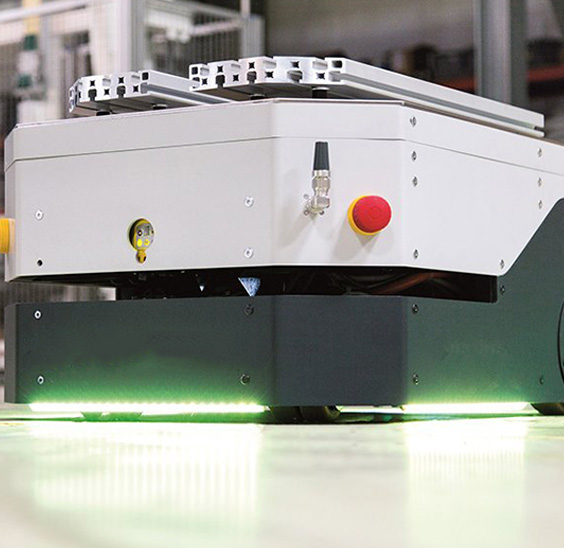
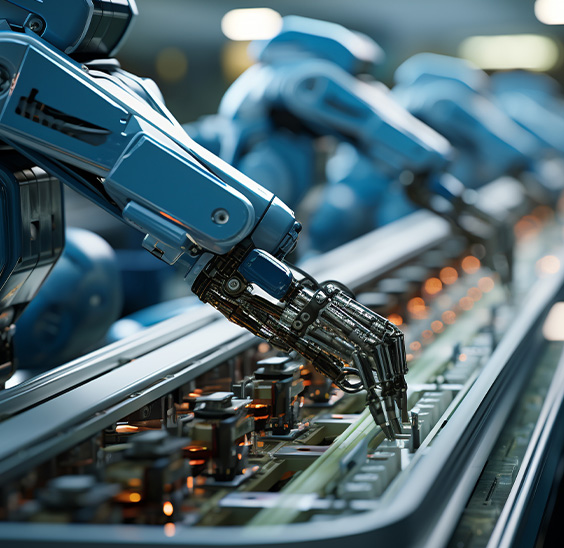
Os motores e redutores Saiya são amplamente utilizados em robôs industriais, logística inteligente, máquinas de novas energias, robôs AGV e outras áreas avançadas. Além disso, desempenham funções críticas no processamento de alimentos, embalagens, têxteis, eletrónica, equipamentos médicos e máquinas especializadas, oferecendo soluções diferenciadas e económicas para diversos setores.
Para melhorar as nossas vantagens em termos de diferenciação e relação custo-benefício, possuímos a nossa própria empresa comercial, a Hangzhou Saiya Transmission Equipment Co., LTD, localizada em Hangzhou, Zhejiang, perto dos portos de Xangai e Ningbo, para servir os negócios nacionais e internacionais, e, em conjunto com as vendas e distribuição diretas, garantimos a distribuição global e o apoio ao cliente, fornecendo soluções económicas e fiáveis de alta qualidade para todos os nossos clientes.

 linguagem
linguagem